
1 /
1
四軸Modbus通訊運動控制器 MT-100-M
相關說明:
-
 左右滑動看表格
左右滑動看表格程式範例: 梯形速度曲線位移
A軸由速度等於0,在加速度100,000單位/秒2下,
加速至定速20,000單位/秒2,
然後再以減速度100,000單位/秒2減速至0,
總共位移10,000單位: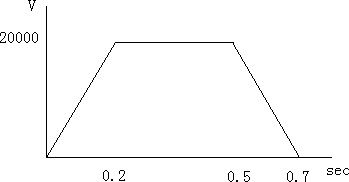 左右滑動看表格
左右滑動看表格Modbus 16進制 說明 Galil指令 01 10 00 70 00 02 04 00 00 27 10 A軸(70暫存器位置)增量位移
10,000單位= 0x2710
B軸暫存器位置=0x72
C軸暫存器位置=0x74
D軸暫存器位置=0x76(Position Relative)
PR A=1000001 10 00 30 00 02 04 00 00 4E 20 A軸(30暫存器位置)到達定速
20,000單位/秒2 =0x4E20
B軸暫存器位置=0x32
C軸暫存器位置=0x34
D軸暫存器位置=0x36速度(Speed)
SP A=2000001 10 00 50 00 02 04 00 01 86 A0 A軸(50暫存器位置)減速度
100,000單位/秒=0x0186A0
B軸暫存器位置=0x52
C軸暫存器位置=0x54
D軸暫存器位置=0x56(Deceleration)
DC A=l0000001 10 00 40 00 02 04 00 01 86 A0 A軸(40暫存器位置)加速度
100,000單位/秒=0x0186A0
B軸暫存器位置=0x42
C軸暫存器位置=0x44
D軸暫存器位置=0x46(Acceleration)
AC A=l0000001 05 00 19 FF 00 A軸(19暫存器位置)
開始運動(Begin)
B軸暫存器位置=0x1A
C軸暫存器位置=0x1B
D軸暫存器位置=0x1C(Begin)
BG A
-
程式範例說明 左右滑動看表格
程式範例: 梯形速度曲線位移
A軸由速度等於0,在加速度100,000單位/秒2下,
加速至定速20,000單位/秒2,
然後再以減速度100,000單位/秒2減速至0,
總共位移10,000單位: 左右滑動看表格Modbus 16進制 說明 Galil指令 01 10 00 70 00 02 04 00 00 27 10 A軸(70暫存器位置)增量位移
10,000單位= 0x2710
B軸暫存器位置=0x72
C軸暫存器位置=0x74
D軸暫存器位置=0x76(Position Relative)
PR A=1000001 10 00 30 00 02 04 00 00 4E 20 A軸(30暫存器位置)到達定速
20,000單位/秒2 =0x4E20
B軸暫存器位置=0x32
C軸暫存器位置=0x34
D軸暫存器位置=0x36速度(Speed)
SP A=2000001 10 00 50 00 02 04 00 01 86 A0 A軸(50暫存器位置)減速度
100,000單位/秒=0x0186A0
B軸暫存器位置=0x52
C軸暫存器位置=0x54
D軸暫存器位置=0x56(Deceleration)
DC A=l0000001 10 00 40 00 02 04 00 01 86 A0 A軸(40暫存器位置)加速度
100,000單位/秒=0x0186A0
B軸暫存器位置=0x42
C軸暫存器位置=0x44
D軸暫存器位置=0x46(Acceleration)
AC A=l0000001 05 00 19 FF 00 A軸(19暫存器位置)
開始運動(Begin)
B軸暫存器位置=0x1A
C軸暫存器位置=0x1B
D軸暫存器位置=0x1C(Begin)
BG A


